基本思路
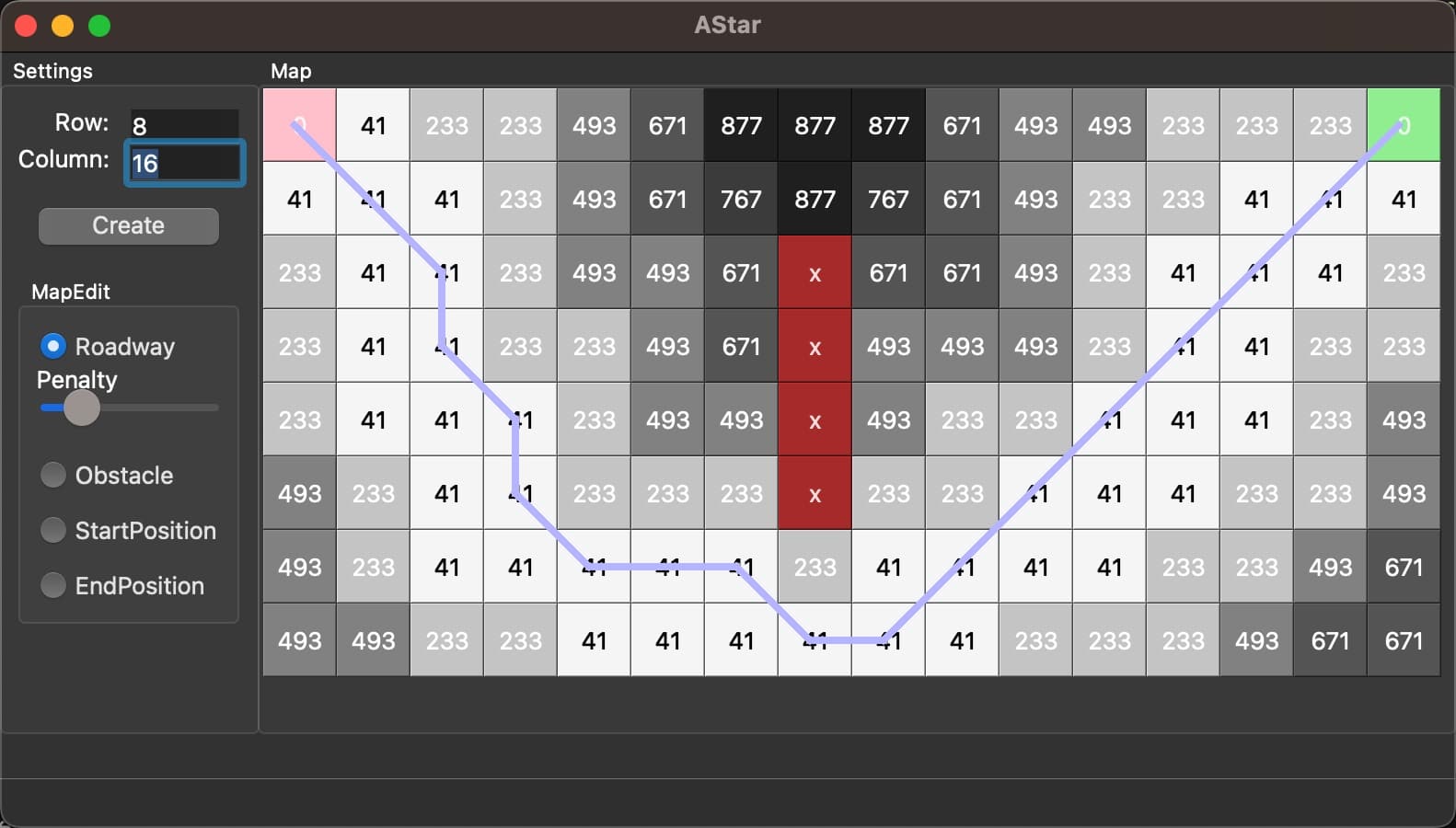
本项目是基于这篇文章里面的代码修改的:A*算法深入探究 - 使用Qt和C++实现带权重版本的A*
先将 A* 相关的类修改为维度无关的(Dimension Agnosticism),再实现一份存储三维地图数据的地图结构。由于之前的工作,A* 算法已经与地图类解耦了,所以可以实现用同一份 A* 算法,寻路的维度由地图类决定。
使用模板扩展Node的维度
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 namespace astar {namespace bg = boost::geometry;namespace bgm = boost::geometry::model;enum class NodeStatus { wild, open, closed }; template <std::size_t DimensionCount>class Node : public gridmap::Node<DimensionCount>{ public : Node () : _parent(this ) {} int get_g_cost () const return _g_cost; } int get_h_cost () const return _h_cost; } int get_f_cost () const return _f_cost; } void set_g_cost (int g_cost) { _g_cost = g_cost; _f_cost = _g_cost + _h_cost; } void set_h_cost (int h_cost) { _h_cost = h_cost; _f_cost = _g_cost + _h_cost; } Node* get_parent () const { return _parent; } void set_parent (Node* parent) NodeStatus get_status () { return _status; } void set_status (NodeStatus s) void refresh () override { gridmap::Node<DimensionCount>::refresh (); _g_cost = 0 ; _h_cost = 0 ; _f_cost = 0 ; _status = NodeStatus::wild; } int distance (Node& n) return bg::comparable_distance (this ->get_position (), n.get_position ()); } bool operator >(const Node& n) const { return _f_cost > n._f_cost; } private : int _g_cost = 0 ; int _h_cost = 0 ; int _f_cost = 0 ; NodeStatus _status = NodeStatus::wild; Node* _parent; }; }
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 namespace gridmap {namespace bg = boost::geometry;namespace bgm = boost::geometry::model;template <std::size_t DimensionCount>class Node { typedef bgm::point<int , DimensionCount, bg::cs::cartesian> point; public : Node () : _walk_cost(0 ), _position() {} Node (point position, double walk_cost = 0 ) : _walk_cost(walk_cost), _position(position) {} double get_walk_cost () return _walk_cost; } void set_walk_cost (double cost) const point& get_position () const return _position; } point& set_position () { return _position; } bool isWalkable () const return !std::isinf (_walk_cost); } virtual void refresh () virtual bool operator ==(const Node& n) const { if (this == &n) return true ; return bg::equals (_position, n.get_position ()); } bool operator !=(const Node& n) const { return !(*this == n); } private : double _walk_cost; point _position; }; }
去除Pathfinder类中对于二维点的依赖
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 namespace astar {namespace bg = boost::geometry;namespace bgm = boost::geometry::model;template <std::size_t DimensionCount>class PathFinder { typedef bgm::point<int , DimensionCount, bg::cs::cartesian> point; typedef gridmap::Map<Node<DimensionCount>> map_t ; typedef Node<DimensionCount> node_t ; public : PathFinder () : _map(nullptr ) {} PathFinder (map_t & map, const point& starting_position, const point& ending_position) : _map(&map), _starting_position(starting_position), _ending_position(ending_position) { } void set_starting_position (const point starting_position) void set_ending_position (const point ending_position) void set_map (map_t & map) std::vector<node_t *> findPath () { return findPath (*_map, _starting_position, _ending_position); }; void showPath (const std::vector<node_t *>& path) return showPath (*_map, path); } static std::vector<node_t *> findPath (map_t & map, node_t * start_node, node_t * target_node) { iterableHeap<node_t *> open_set; map.refreshMap (); start_node->set_status (NodeStatus::open); open_set.push (start_node); while (!open_set.empty ()) { node_t * current_node = open_set.top (); open_set.pop (); current_node->set_status (NodeStatus::closed); if (*current_node == *target_node) { std::deque<node_t *> path; node_t * current_node = target_node; while (*current_node != *start_node) { path.push_front (current_node); current_node = current_node->get_parent (); } path.push_front (current_node); return std::vector<node_t *>{path.begin (), path.end ()}; } auto ns = map.getNeighbours (*current_node); for (auto neighbour : map.getNeighbours (*current_node)) { if (!neighbour->isWalkable () || neighbour->get_status () == NodeStatus::closed) { continue ; } int new_cost_to_neighbour = current_node->get_g_cost () + current_node->distance (*neighbour) * (1.0 + current_node->get_walk_cost ()); bool is_neighbour_in_open_set = neighbour->get_status () == NodeStatus::open; if (new_cost_to_neighbour < neighbour->get_g_cost () || !is_neighbour_in_open_set) { neighbour->set_g_cost (new_cost_to_neighbour); neighbour->set_h_cost (neighbour->distance (*target_node)); neighbour->set_parent (current_node); if (!is_neighbour_in_open_set) { neighbour->set_status (NodeStatus::open); open_set.push (neighbour); } else { std::make_heap (open_set.begin (), open_set.end ()); } } } } return {}; } static std::vector<node_t *> findPath (map_t & map, point start_position, point end_position) { return findPath (map, &map[start_position], &map[end_position]); } private : point _starting_position; point _ending_position; map_t * _map; }; }
重写gridmap,全部换成三层循环
思路是,A* 不管寻路是几维的,只要 Node 实现的 distance 方法支持对应的维度,以及 Map 存储的节点是对应的维度,能够寻找到 neighbours,A* 就可以正常工作。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 namespace gridmap {template <typename T>requires std::is_base_of_v<Node<3 >, T> class Map { typedef std::vector<std::vector<std::vector<T>>> container; typedef std::vector<std::vector<T>> container_layer; typedef std::vector<T> container_line; typedef bgm::point<int , 3 , bg::cs::cartesian> point; public : Map () : _map_size(0 , 0 , 0 ), _grid_size(1 , 1 , 1 ) {} Map (int x, int y, int z, int sx = 1 , int sy = 1 , int sz = 1 ) : _map_size(x, y, z), _grid_size(sx, sy, sz), _map(container (x, container_layer (y, container_line (z, T ())))) { setNodeData (); } Map (std::vector<std::vector<std::vector<double >>> map_data, const point& grid_size = point (1 , 1 , 1 )) { _grid_size = grid_size; int x = map_data.size (); if (x > 0 ) { int y = map_data[0 ].size (); if (y > 0 ) { int z = map_data[0 ][0 ].size (); _map_size.set <0 >(x); _map_size.set <1 >(x); _map_size.set <2 >(x); _map = container (x, container_layer (y, container_line (z, T ()))); setNodeData (map_data); } } } void setNodeData (std::vector<std::vector<std::vector<double >>> map_data = {}) { for (int i = 0 ; i < _map_size.get <0 >(); ++i) { for (int j = 0 ; j < _map_size.get <1 >(); ++j) { for (int k = 0 ; k < _map_size.get <2 >(); ++k) { bg::set <0 >(_map[i][j][k].set_position (), i * (_grid_size.get <0 >())); bg::set <1 >(_map[i][j][k].set_position (), j * (_grid_size.get <1 >())); bg::set <2 >(_map[i][j][k].set_position (), k * (_grid_size.get <2 >())); if (map_data.size () > 0 ) { _map[i][j][k].set_walk_cost (map_data[i][j][k]); } } } } } const point& get_map_size () return _map_size; } T& operator [](const point& p) { return _map[p.get <0 >()][p.get <1 >()][p.get <2 >()]; } std::vector<T*> getNeighbours (const point& p) { std::vector<T*> neighbours; for (int i = -1 ; i <= 1 ; ++i) { for (int j = -1 ; j <= 1 ; ++j) { for (int k = -1 ; k <= 1 ; ++k) { int x = p.get <0 >() + i; int y = p.get <1 >() + j; int z = p.get <2 >() + k; if (((i == 0 && j == 0 && k != 0 ) || (i == 0 && j != 0 && k == 0 ) || (i != 0 && j == 0 && k == 0 )) && x >= 0 && y >= 0 && z >= 0 && x < _map_size.get <0 >() && y < _map_size.get <1 >() && z < _map_size.get <2 >()) { neighbours.push_back (&_map[x][y][z]); } } } } return neighbours; } std::vector<T*> getNeighbours (const T& n) { return getNeighbours (n.get_position ()); } void refreshMap () { for (auto & layer : _map) { for (auto & line : layer) { for (auto & item : line) { item.refresh (); } } } } private : point _map_size; point _grid_size; container _map; }; }
可迭代的优先队列
为了杜绝寻路过程中堆结构被破坏,所以如果修改的节点已经在优先队列中,需要重新建堆,下面的类可以使用std::make_heap函数:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 namespace astar {template <typename T>struct lowerFCost { bool operator () (T n1, T n2) { if (n1->get_f_cost () == n2->get_f_cost ()) { return n1->get_h_cost () > n2->get_h_cost (); } return n1->get_f_cost () > n2->get_f_cost (); } }; template <class T , class Container = std::vector<T>, class Compare = lowerFCost<T>>class iterableHeap : public std::priority_queue<T, Container, Compare>{ public : typedef typename std::priority_queue<T, Container, Compare>::container_type::const_iterator const_iterator; const_iterator find (const T& t) const { auto first = this ->c.cbegin (); auto last = this ->c.cend (); while (first != last) { if (*first == t) return first; ++first; } return last; } typename Container::iterator begin () return this ->c.begin (); } typename Container::iterator end () return this ->c.end (); } }; }